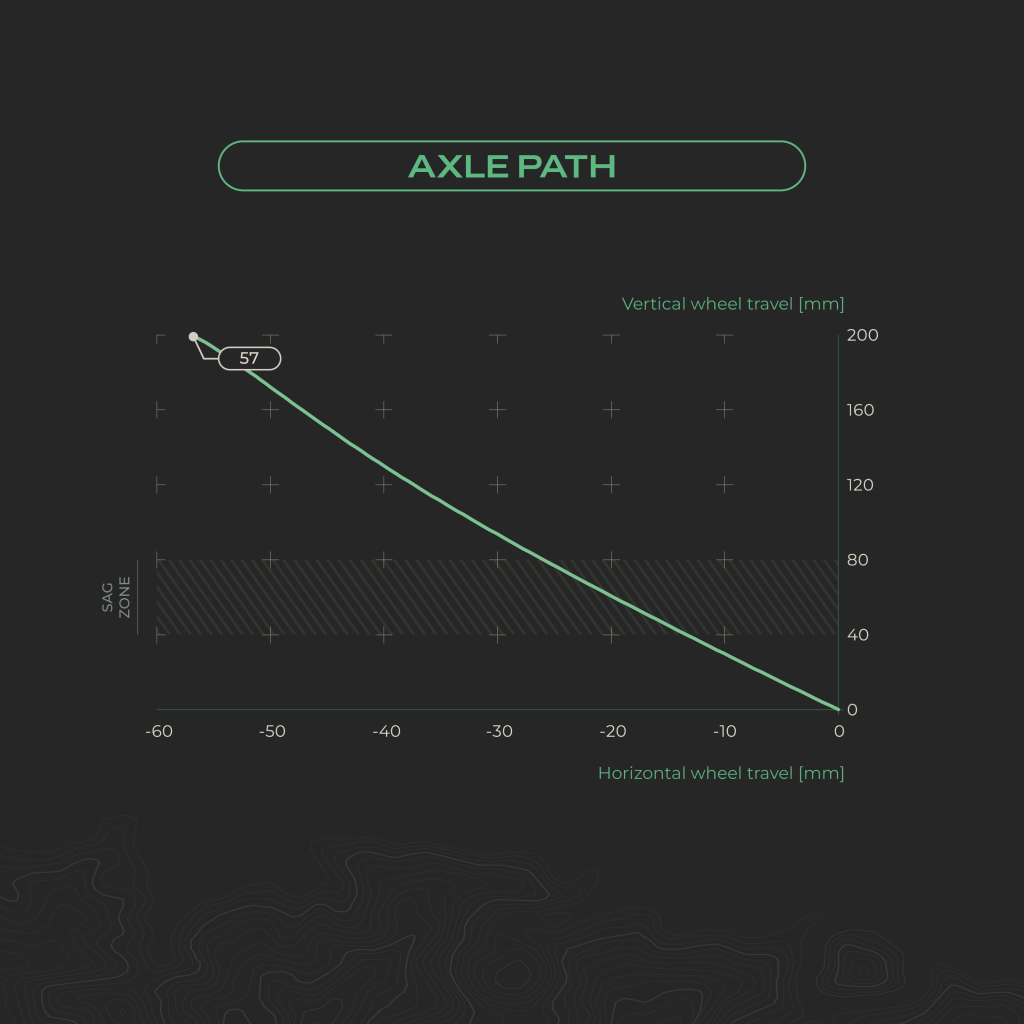
Primera entrada de la sèrie de publicacions on compartirem les idees que hi ha darrere el sistema de suspensió de Dorothea (OLS System). Comencem per la característica que més diferencia Dorothea del que es pot trobar en qualsevol altre sistema de suspensió (que nosaltres coneguem!): La trajectòria de l’eix posterior. Com es veu en el gràfic, la trajectòria s’assembla a una línia recta i està inclinada cap endarrere, amb un angle aproximat de 74,2º respecte l’horitzontal, la qual cosa provoca un retrocés de l’eix de 57 mm (en el cas de Dorothea 20, configurada amb roda de 29” i posició curta de l’eix posterior). El que aconseguim amb això és que la trajectòria estigui el més alineada possible amb la majoria d’impactes que rep la roda, ja siguin tant deguts a pedres i sotracs com recepcions de grans salts.
Però comencem pel principi: Què és una trajectòria amb retrocés? Quins altres tipus de trajectòries hi ha? Per què diem que la trajectòria de Dorothea és la seva característica més diferenciadora?
A la següent imatge comparem la trajectòria de roda de Dorothea 20 i Dorothea 17 amb diferents exemples arbitraris de trajectòries de roda segons on es situa el pivot principal. S’ha de dir que els sistemes amb pivot virtual van canviant la ubicació del pivot principal en funció del seu recorregut. En aquest cas només es representen sistemes de pivot simple.
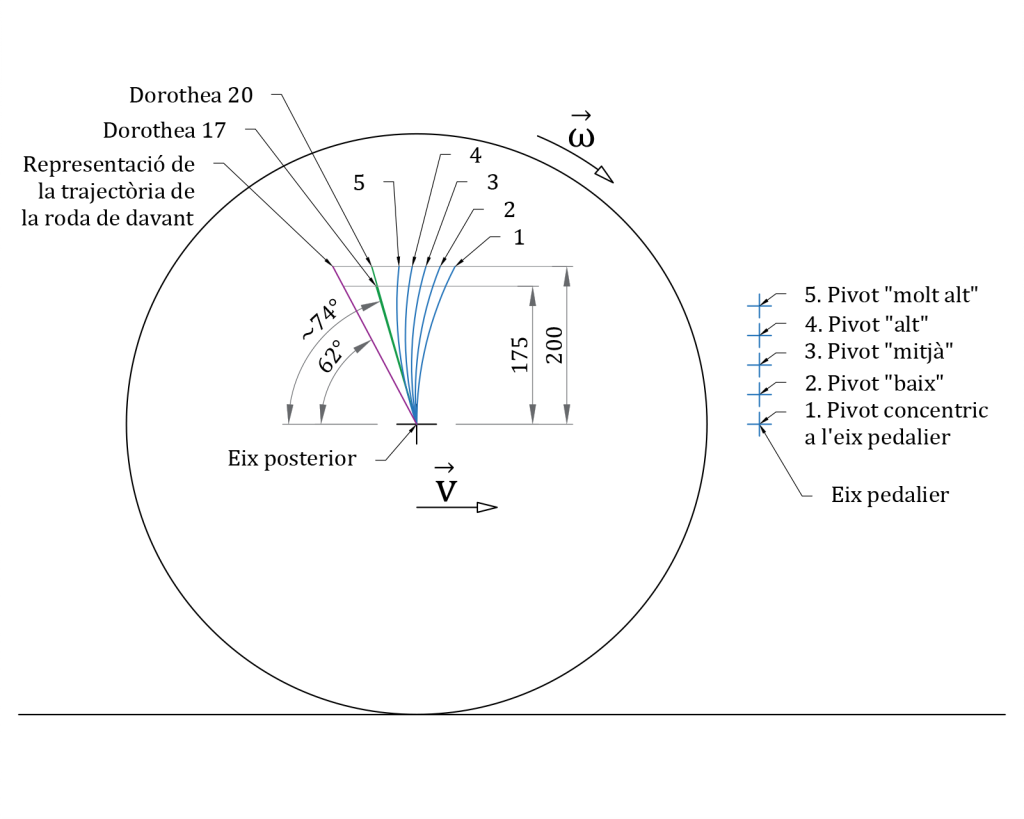
Una trajectòria amb retrocés és aquella que es desplaça cap endarrere respecte a la vertical com a mínim durant la major part del seu recorregut. Com es pot veure, la trajectòria de Dorothea té un retrocés molt més pronunciat que qualsevol altra i s’assembla a una línia recta, cosa que fa que la direcció en què treballa la suspensió es mantengui més estable durant tot el recorregut, molt més semblant també a la trajectòria de la roda davantera, que encara és més inclinada.
Hi ha diversos motius pels quals creiem que molts fabricants i marques no aposten per una trajectòria cap endarrere (“high” o “very high” pivot) o, si ho fan, no és tan pronunciada com la que nosaltres hem dissenyat per Dorothea 20 i Dorothea 17. Es sol dir que una trajectòria de la roda posterior cap endarrere:
- Resulta en un major Anti-rise o interferència amb la frenada que les trajectòries verticals o inclinades cap endavant. Això és veritat sempre que no s’utilitzi un mecanisme de “fre flotant”, però en tot cas aquesta tampoc és una solució que ens agradi donat l’augment de complexitat constructiva, el pes i el cost. Com explicarem en un article dedicat al paràmetre Anti-Rise, no estem d’acord amb la interpretació que se’n sol fer ni amb el que es consideren com valors “massa elevats”. Tanmateix, al respecte d’aquest punt, podem dir que la nostra experiència tant amb Dorothea 20 com Dorothea 17 és bona.
- Implica un canvi en la distribució de la massa respecte els eixos de les rodes. Això és tan veritat com que no hi ha cap trajectòria de la roda de darrere (de cap bicicleta que coneguem) que no provoqui un canvi en la distribució de la massa respecte els eixos. A més, tampoc percebem aquest fet com un problema. Posam per exemple una distància entre eixos de 1300 mm amb un 66% del pes del ciclista situat a la roda del darrere i un 34% a la del davant. Amb un retrocés de l’eix de 57 mm i suposant que la roda de davant també es comprimís al màxim (retrocés de 93 mm per un angle de direcció de 62º), la nova distribució de masses respecte els eixos quedaria amb un 61% a la roda del darrere i un 39% a la del davant. És a dir, s’augmenta la proporció de pes (entre un 5 i un 10% segons la configuració i talla) a la roda del davant per la pròpia compressió del sistema de suspensió. Amb una trajectòria de roda totalment vertical, en el mateix exemple anterior, la distribució de masses seria d’aproximadament un 37% a la roda del darrere i un 63% a la del davant, amb el sistema totalment comprimit. Com veiem, estem parlant de diferències que segurament siguin difícils de percebre i tampoc està clar quin cas és més favorable.
- Provoca un retrocés dels pedals («Pedal Kick-back»), donat que augmenta la distància entre plat i pinyons i la cadena estira les bieles cap endarrere. Perquè això no passi és necessari l’ús d’un desviador de la cadena i això augmenta la complexitat del sistema. A més, en el cas del nostre sistema de suspensió, aquest desviador va fix a un dels enllaços del sistema, cosa que encara en complica més el disseny. Per part nostra, podem reconèixer que és l’inconvenient més evident i és el preu que estem disposats a pagar si per altra banda obtenim uns avantatges notables.
A canvi d’aquests certs inconvenients que es solen posar com a contra argument a les trajectòries amb retrocés, creiem que una trajectòria amb retrocés és objectivament més eficaç a l’hora d’esmorteir els impactes i aportar una major estabilitat al conjunt Pilot-Triangle Principal (massa suspesa del sistema).
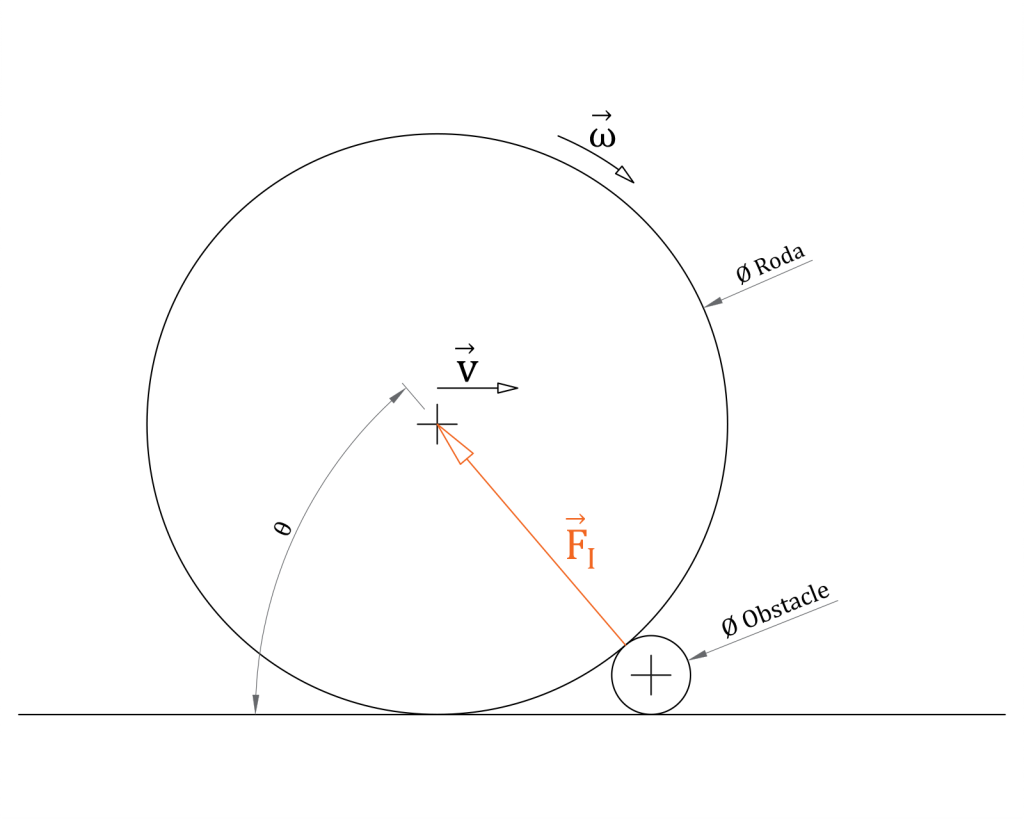
El vector força d’impacte té una direcció definida pel punt de contacte roda-terra i el punt concèntric al perímetre de la roda, és a dir, l’eix de la roda, i el seu sentit sempre va del punt de contacte roda-terra fins a l’eix de la roda. En la següent imatge es pot veure aquesta definició gràficament.
Aleshores, quina seria la direcció majoritària dels impactes que rep una roda? Segurament no només hi ha una resposta correcta, ja que probablement hi influeixen factors com el tipus de circuit, terreny i fins i tot l’estil de conducció, i per conèixer les diferents respostes seria necessària una extensa recollida de dades amb un equip de sensors i un estudi estadístic que tingués en compte tots aquests possibles factors. A falta dels recursos necessaris i temps, l’opció més raonable és fer una aproximació teòrica. Per començar, a la següent taula calculem l’angle de la direcció de la força d’impacte per una roda de 29” i diferents altures d’obstacles.
| Ø Obstacle [mm] | θ [º] |
| 0 | 90 |
| 20 | 71,29 |
| 40 | 63,76 |
| 60 | 58,14 |
| 80 | 53,52 |
| 100 | 49,55 |
| 120 | 46,04 |
| 140 | 42,89 |
| 160 | 40,02 |
El que per a nosaltres és important d’aquest càlcul no és el valor concret de l’angle majoritari dels vectors d’impacte, sino el fet que, per una altura d’obstacle relativament petita (20 mm), l’angle de l’impacte ja té una inclinació molt significativa, recordam que la trajectòria de la roda de Dorothea té un angle aproximat de 74º.
I aleshores, com afecta això a la capacitat o eficàcia d’esmorteïment d’un sistema de suspensió? Deixant de banda la longitud del recorregut de suspensió, cal tenir en compte que, ben igual que un element molla-amortidor lineal, un sistema de suspensió només és capaç d’esmorteir al 100% forces o impactes exactament paral·lels a la seva direcció d’esmorteïment (en el cas de les bicicletes, la trajectòria de la roda). Què passa quan un impacte no està perfectament alineat amb la trajectòria de la roda? Idò que el sistema només és capaç d’esmorteir la component de la força d’impacte paral·lela. En canvi, la component de la força perpendicular no es pot esmorteir i provoca un impacte rígid, que a la pràctica és el causant de vibracions descontrolades i de frenar la bicicleta. La imatge a continuació explica gràficament aquesta situació, on es compara la trajectòria aproximada de Dorothea 20 amb una trajectòria fictícia totalment vertical.
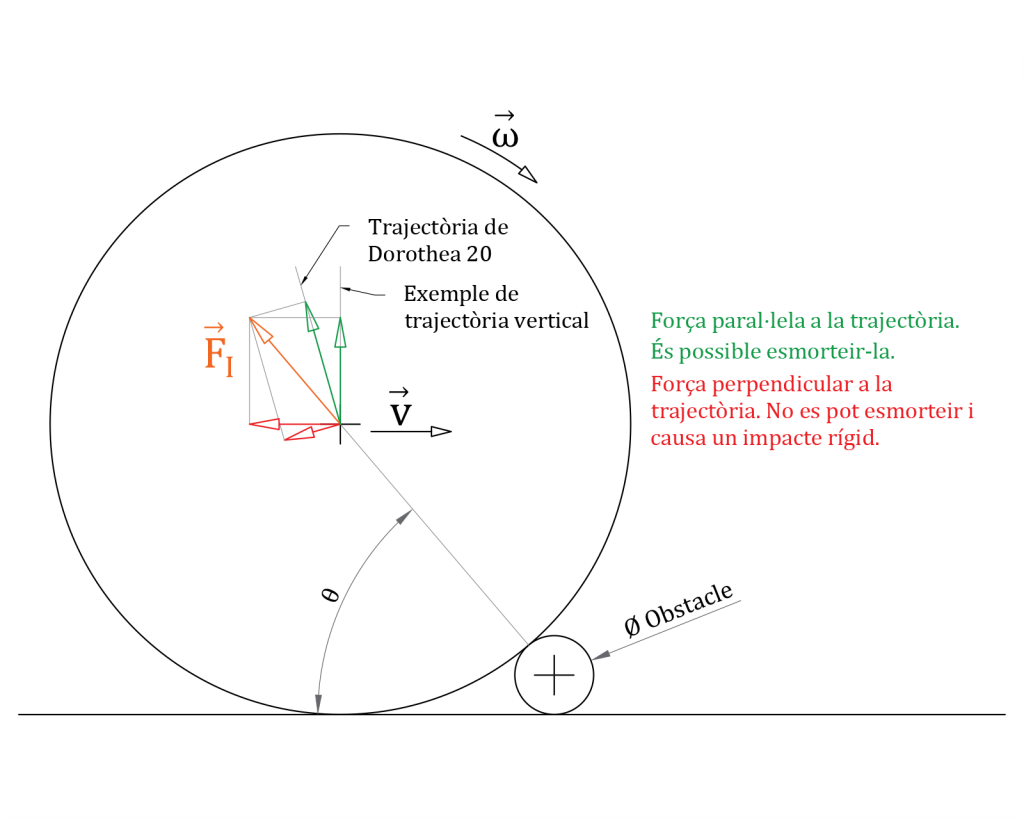
Amb aquest esquema de forces es pot veure que la component de la força que és possible esmorteir és significativament major en el cas de la trajectòria de Dorothea 20. En canvi, la component de la força que no és possible esmorteir és significativament major en el cas d’una trajectòria vertical. Aquest fet és el que ens ha duit a dissenyar una trajectòria no només amb retrocés, sino que canviï la seva direcció el mínim possible, de manera que la suspensió tengui un comportament el més predictible possible al llarg del seu recorregut. Encara més, creiem que reduir els impactes rígids té un paper important en la durabilitat de la bicicleta i la seguretat del pilot.